※ 이 글은 자동차 산업과 자율주행 기술에 무지한 일개 투자자의 매주 주관적이고 편협한 생각으로 작성된 글입니다. 투자에 대한 의견을 밝히는 글은 아니고 자율주행 기술과 AI 그리고 로봇으로 이어지는 기술 발달에 대한 주관적 생각을 작성한 글이라는 점을 강조하고 싶습니다.
자율주행 기술은 어디까지 왔을까
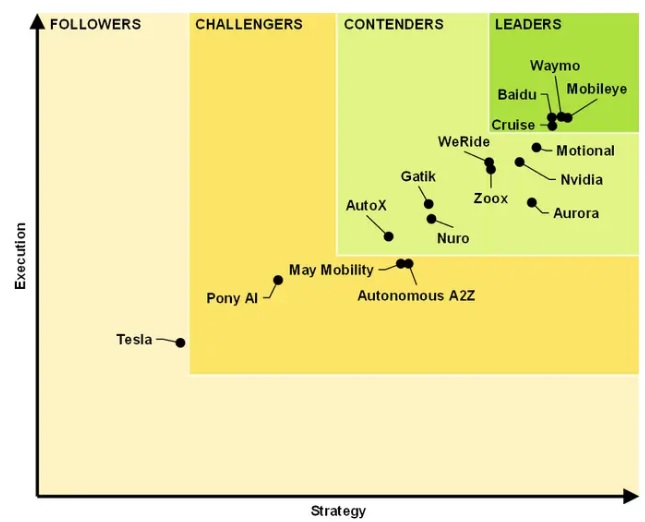
최하위가 테슬라?
현재 가장 높은 수준의 자율주행 기술을 가진 기업은 어디인가라는 질문에 대한 대답은 기준에 따라 사람에 따라 다를 것입니다. 어떤 기준을 가지고 자율주행 기술을 평가해야 할까 생각해 보면 자율주행에 대해 조금이라도 알아본 사람들은 자율주행 기술의 단계(Level)에 따라 평가해야 한다고 대답하는 사람이 가장 많을 것이라고 생각합니다. 자율주행 기술의 단계란 0단계부터 5단계까지 총 6단계로 나뉘는데, 0단계는 아예 모든 것을 운전자가 직접 해야 하는 단계, 1단계와 2단계는 일부 운전에 있어서 운전자의 운전을 도울 수 있는 단계, 3단계는 특정 상황을 제외한 일반적인 상황에서는 운전자가 개입하지 않아도 스스로 주행할 수 있지만 운전자는 항상 주의를 기울이고 운전할 준비를 하고 있어야 하는 단계, 4단계는 대게의 경우 자율주행이 운전을 대신할 수 있지만 주행시스템이 요청할 경우 바로 운전을 직접 해야 하는 단계, 5단계는 모든 상황에서 운전자가 필요 없는 단계라고 할 수 있습니다. 자율주행 산업 내에서 현재 완벽한 자율주행이라고 할 수 있는 5단계를 달성한 기업은 없는 상태이며, 최고 4단계를 달성한 기업들은 있습니다. 이러한 4단계 자율주행을 달성한 기업들은 일부 지역에서 무인택시를 운행하면서(원격 시스템을 통한 운전 개입을 언제나 준비하고 있는 상태라 4단계) 자율주행 데이터를 쌓고 있는 수준입니다(웨이모와 크루즈 그리고 바이두가 일부 지역에서 무인택시를 운행하고 있으며, 모빌아이는 무인택시를 현재 운행하고 있진 않지만 운행할 예정이라고 합니다.). 전기차 산업에서 가장 유명한 기업이라고 할 수 있는 테슬라는 현재 4단계는커녕 3단계 조차 아닌 2단계(2.9단계라고 표현하는 사람들도 있습니다.)인 상황입니다. 이러한 상황만 놓고 판단한다면 테슬라는 자율주행 기술 단계가 낮은 자율주행 산업에서 경쟁력이 낮은 기업이라고도 할 수 있을지 모릅니다. 실제로 한 조사결과에서는 테슬라의 자율주행 기술이 다른 여타 기업의 자율주행 기술에 비해 매우 뒤떨어진다는 결과가 나오기도 하였습니다.
테슬라의 자율주행 단계가 낮고, 테슬라의 자율주행에 대한 평가가 매우 낮다고 하여도 저는 테슬라의 자율주행 기술이 여타 기업들의 자율주행 기술에 비해 월등한 점이 분명히 존재한다고 생각합니다.
테슬라와 여타 기업들의 자율주행 기술의 차이점
사용하는 센서
자율주행을 위해서는 자율주행 시스템이 외부상황을 인식할 수 있어야 합니다. 이를 위해 필요한 것이 센서이며, 센서의 종류는 크게 카메라, 레이더, 라이다가 있습니다. 카메라는 사람의 눈과 같이 비전을 통해 시각정보를 센싱하는 센서입니다. 레이더는 전파를 통해 주변 상황을 파악하는 센서입니다.(박쥐가 초음파를 통해 주변 상황을 인식하는 것과 비슷하다고 생각하면 됩니다.) 라이다는 레이저를 통해 주변 상황을 파악하는 센서로 주변의 3차원 환경을 가장 정확하게 인식해 낼 수 있는 센서입니다.(정확도가 가장 높지만 가격이 비싸고 악천후에 취약함) 보통 자율주행 기업들은 카메라, 레이더, 라이다를 모두 사용합니다. 테슬라는 라이다는 사용하지 않으며, 레이더는 사용하지만 궁극적으로는 레이더도 사용하지 않고 카메라만으로 자율주행을 실현하는 것을 목표로 하고 있습니다. 테슬라를 제외한 여타 기업들이 내세우는 대표적인 논리는 운전은 사람의 목숨이 좌우될 수도 있는 매우 신중히 다뤄져야 할 분야이기에 되도록 정확한 자율주행을 위해 카메라, 레이더, 라이더를 모두 사용하여 최대한 안전한 자율주행을 구현해야 한다는 것입니다.(저는 이를 안전성 때문이라기보다는 더 빠르게 더 높은 단계의 자율주행 기술을 달성하기 위해서라고 판단하고 있습니다.) 테슬라 측(일론 머스크라고 해도 무방)의 논리는 라이다를 쓰는 것은 자율주행 기술에 자신이 없기 때문이며, 자율주행 기술만 발전된다면 레이더도 없어도 되고 카메라만으로 자율주행을 구현가능하다는 것입니다. 애초에 사람도 시각을 기반으로 운전을 하니, 자율주행 기술이 발달한다면 시각정보만으로 사람처럼 혹은 사람 이상으로 운전이 가능할 것이라 주장하고 있는 것입니다. 또한 라이다나 레이더를 쓰지 않는 것으로 비용절감까지 할 수 있으니 당장 자율주행 기술이 탑재된 차량을 판매해야 하는 테슬라 입장에서는 더더욱 최소한의 센서만 사용하고 싶기도 할 것입니다.(저는 개인적으로 테슬라가 선택한 길이 더 나은 길이 아닐까 생각하고 있는 입장입니다. 왜 그렇게 생각하는지에 대해서는 뒤에서 자세히 밝히겠습니다.)
자율주행 기술의 지향점
테슬라의 자율주행이 지향하는 바는 위에서 언급한 바와 같이 시각만으로 외부 환경을 인식하고 반응할 수 있는 자율주행 기술을 달성하는 것입니다. 여타 자율주행 기업들이 지향하고 있는 것은 다른 기업들보다 빠르게 5단계의 완전자율주행 기술을 달성하는 것입니다. 이러한 지향점의 차이는 향후에도 엄청난 기술격차를 만들어낼 것이라 생각하지만(테슬라가 여타 기업들에 비해 앞서는 기술격차를 말합니다.) 지금 당장에도 자율주행에 있어 현저한 차이를 보여주고 있기도 합니다. 그 차이란 실제 자율주행 방법의 차이입니다. 여타 기업들은 실제 자율주행에 있어 경로를 선택의 제약을 둔 것으로 보입니다. 자율주행을 통해 원하는 목적지까지 가고자 할 경우, 현재 4단계라고 하는 자율주행 기술들은 해당 기술이 아직 소화하기 어려운 경로는 일부러 피하고 현재 자율주행 기술 수준에서 소화 가능한 경로를 취사선택하는 모습을 보여줍니다. 이는 비용이 많이들더라도 카메라와 레이더뿐 아니라 라이다를 사용하여 최대한 빨리 더 높은 단계의 자율주행 레벨을 달성하려는 것과 같이, 경로를 제한하는 것으로 최대한 빨리 운전자 개입 없이 자율주행이 가능한 자율주행 시스템을 만들기 위한 방법의 일환일 것입니다. 저는 그러한 방법이 일종의 편법이라고 생각합니다. 경로의 제한 때문에 실제 운전자가 운전 시 그렇게 가지 않을 경로로 빙둘러가다 보니 도착지까지 가는 시간에 있어 많은 시간이 걸리게 되기 때문입니다. 테슬라의 경우는 자율주행에 있어서 피하는 경로 같은 것은 없습니다. 원하는 목적지가 있다면 그 목적지로 가기 위한 최단 경로의 길을 선택하는 편입니다. 아직 자율주행 기술이 완벽하지 않다 보니 일부 부분에 있어서는 운전자의 개입이 필요한 것은 사실입니다. 그렇기 때문에 테슬라의 자율주행 기술이 아직 2단계인 것입니다. 하지만 테슬라의 자율주행은 여타 기업들의 자율주행 기술이 소화하지 못하는 난이도 높은 상황과 구간을 자연스럽게 소화하기도 하며, 아직 제대로 소화해내지 못하는 상황과 구간이 있다 하더라도 지속적인 자율주행 기술 업데이트를 통해 점점 더 자율주행의 완성도를 높이고 어려운 난이도의 상황과 구간을 극복해 나가고 있습니다. 이러한 점을 통해 자율주행 기술을 평가한다면 단순히 자율주행 단계만을 가지고 테슬라의 자율주행 기술이 여타 4단계 자율주행 기술에 비해 뒤떨어진다고 판단하는 것은 무리가 있다고 생각합니다. 오히려 일정 부분(여타 4단계 자율주행 기술들이 소화하기 힘든 상황과 구간)에 있어선 테슬라의 자율주행 기술력이 앞서는 것으로 판단할 수 있는 여지가 많다고 생각합니다. 물론 완전자율주행인 5단계 자율주행을 어떤 식으로든 달성한다는 것은 매우 큰 임팩트가 될 것이며, 이를 성공하는 기업의 기술은 어떠한 부분에 있어도 폄훼할 수 없는 뛰어난 기술임을 인정해야 한다고 생각합니다.(테슬라가 무조건 맞는 길로 가고 있다, 다른 기업은 편법을 쓰니 잘못된 길로 가고 있다는 의견이 아님을 강조합니다.) 어떤 지향점을 가진 기업이 완전자율주행을 먼저 달성할지는 모르겠지만 AI와 로봇이라는 분야까지의 확정성에 대해서는 테슬라의 자율주행이 지향하고 있는 자율주행의 방향이 월등히 앞서있다고 생각합니다.
테슬라 자율주행 기술이 AI와 로봇 분야로 확장 가능한 이유
시각정보만을 기반으로 한 실시간 상호작용 AI 기술
테슬라의 자율주행 기술은 시각정보만을 기반으로 합니다. 자율주행이라는 기술 자체가 외부 상황을 스스로 판단하여 어떻게 주행을 할지 스스로 의사결정 하는 시스템이기 때문에 이또한 AI의 일종이라 할 수 있습니다. 즉, 테슬라는 시각정보만을 근거로 하여 외부와 상호작용하는 AI기술을 개발하고 있는 것이라고 할 수 있습니다. 지금은 자율주행에 이를 사용하고 있는 것이고, 이후에는 자율주행뿐 아니라 다른 영역에 있어서도 이러한 시각 정보에 기반하여 외부와 상호작용하는 AI를 활용할 수 있을 것이라 생각합니다. 물론 여타 자율주행 업체들 또한 이처럼 시각정보를 통해 외부와 상호작용하는 기술로 발전할 수 있는 자율주행 기술을 분명히 가지고 있겠지만, 그 기술 수준은 테슬라보다 뒤떨어질 수밖에 없다고 생각합니다. 애초에 자율주행에 있어서 시각정보만 가지고 자율주행을 구현하려고 하는 테슬라와 달리 여타 자율주행 업체들은 레이더와 라이다 그리고 미리 지정된 경로 등을 통해 더 높은 단계의 자율주행으로 나아가려 했기 때문에 시각정보만으로 외부환경을 인식하고 상호작용하는 AI 기술에 있어서는 테슬라보다 못할 수밖에 없다고 생각합니다. 그리고 이러한 AI기술은 자율주행 이외에도 여러 다양한 영역에서 활용되어질 수 있다고 생각하며, 그러한 분야 중 가장 대표적인 분야가 로봇이라고 생각합니다.
로봇과 가장 어울리기 좋은 AI기술을 보유한 테슬라
현재 AI기술로 가장 핫한 것은 생성형 AI일 것입니다. 생성형 AI는 텍스트, 이미지, 음성, 영상 등을 학습하고 이를 통해 AI가 학습을 토대로한 결과물을 내놓는 AI 기술입니다. AI 기술의 발달을 AI의 상호작용 능력의 고도화라고 한다면, 생성형 AI의 상호작용은 사용자의 Input 값(텍스트를 통한 질문이나 명령)을 인식하고 자신의 Output(질문이나 명령에 대한 자신이 학습한 자료들을 토대로 한 결과물)을 내놓은 일종의 턴제 방식의 상호작용(양쪽이 서로의 순서에 따라 번갈아가며 상호작용)이며, 생성형 AI는 더 나은 Output을 내놓는 것을 추구하는 형태로 발전하고 있는 AI라고 할 수 있습니다. 테슬라의 시각정보를 기반한 실시간 상호작용 AI 기술은 턴제 상호작용이 아닌 시시각각 변화하는 외부환경을 실시간으로 인식하면서 이에 따른 대응을 계속해서 해나가야 하는 동시진행형 방식의 상호작용을 하는 AI 기술입니다. 이러한 AI기술은 결국 로봇에 적용되어, AI가 외부환경과 상황을 실시간으로 인식하고 이에 맞추어 스스로의 행동을 통해 외부에 영향력을 행사할 수 있는 기술로 발전할 수 있을 것이라 생각합니다. 현재 존재하는 AI기술 중 가장 로봇 분야와 어울리는 AI기술을 가진 업체는 테슬라라고 저는 생각합니다. 시각기반 자율주행을 추구하고 있는 시점에서 이미 로봇분야로의 진출 가능성은 필연적으로 생길 수밖에 없는 것이 아니었나 싶습니다. 결과적으로 테슬라는 로봇기업으로서의 비전을 구체화하고 있고 이러한 비전에 대한 구체화를 시각기반 자율주행 기술의 고도화를 통해 이뤄나가고 있다고 생각합니다.
결론
앞서 언급한 것과 같이 저는 자동차 산업과 자율주행 기술에 무지한 일개 투자자일 뿐이며, 이 글에서 언급한 내용들은 무지한 사람의 망상 정도로 끝날 수 있는 내용들입니다. 잘못된 내용이나 예측을 제가 제시했더라도 너그러히 이해해 주시면 감사하겠습니다. 테슬라가 되었든 다른 여타 자율주행 업체가 되었든 완전 자율주행이 실현될 날이 어서 빨리 오기를 바라면서 글을 마치겠습니다.
※ 매수매도 추천이 아니며, 투자는 스스로의 리서치와 판단 하에 해야합니다.
같이보면 좋은 글 테슬라 기업분석
카테고리 바로가기
'투자 아이디어' 카테고리의 다른 글
| 생성형 AI 발달이 메모리 반도체 산업에 미칠 영향 (0) | 2023.05.13 |
|---|---|
| 미래를 주도할 산업의 핵심 기업들 2편(유전자 편집, 핵융합, 우주)/구글 Bard 사용 (0) | 2023.05.03 |
| 미래를 주도할 산업의 핵심 기업들 1편(AI, 양자컴퓨팅)/구글 Bard 사용 (0) | 2023.05.03 |
| 구글(GOOGL), 마이크로소프트(MSFT) 실적과 앞으로 클라우드 산업 관전 포인트 AI (0) | 2023.04.26 |
| Bing 채팅(GPT 기반 AI)과 구글 Bard에게 테슬라 2023 Q1 실적을 물어본 후기 (1) | 2023.04.21 |



댓글